Bu çağda endüstriyel Otomasyon Robotlar, hassas ve daha iyi üretim kalitesi için çeşitli süreçleri işlemek için kullanılır. Mükemmel robot için ideal motoru seçmek, robotu özellikle endüstriler için tasarlarken her zaman zor bir iştir. Uygun seçim elektrik motorları endüstriyel robotlarda kol kontrolü, konum, açısal ve doğrusal hareketleri hesaba katmak için birkaç parametre gerekir.

Endüstriyel Robotikte Kullanılan Motorlar
Motor seçimi, strateji oluşturma ve ciddi analiz gerektiren robotik meraklıları için en az anlaşılan kavramdır.Robot ağırlığına, tekerlek boyutuna ve uygulanacağı uygulamaya göre robot hızı, ivme, tork gereksinimlerinin belirlenmesini içerir.Birçok motor türü vardır. günümüz pazarında mevcuttur, ancak çoğunlukla Küçük çağrı cihazı motorları, Servo motorlar doğrusal motorlar, step motorlar ve DC redüktörlü motorlar endüstriyel robotlarda uygulama alanlarına göre kullanılmaktadır.
Yanlış motor seçimi, engelli bir robotla sonuçlanır, bu durumda, tüm gerçekçi özellikleri göz önünde bulundurarak endüstriyel robotları tüm endüstriyel süreç ihtiyaçlarını karşılayacak gerçek, doğru ve yeterli kılmak için en uygun ve en uygun motor türü hangisidir?
Burada, endüstriyel uygulamalar için seçilecek ilgili motoru seçmek için endüstriyel profesyonellerden bu motorla ilgili bazı bilgiler topladık.
Robotun hassas, uygun maliyetli ve güvenilir hareketleri için mevcut DC, step, fırçasız ve servo motorlarla endüstriyel robotik için en iyi motorları sağlamayı amaçlayan uzmanların görüşlerini takip etmenizi öneririz.
Ch.Sampath Kumar
VLSI Tasarımında M.tech
Teknik İçerik Yazarı
 DC motorlar, sürekli çalışma için geniş aralıklarda mevcuttur, ancak ilgili uygulamaya uygun dişli redüksiyonları gerektirir. Adım motoru, belirli uygulamalar için düşük hız sağladığı için herhangi bir dişli redüksiyonu gerektirmez. Son olarak servo motorlar, kapalı döngü işlemlerinde uygulanan hassas ve doğru kontrol için kullanılır. Ancak ekstra geri bildirim ve sürüş devresi gerektirdiğinden DC ve step motordan daha pahalıdır. Böylece servo motorlar, hassas hareketi nedeniyle robotu daha güvenilir hale getirir.
DC motorlar, sürekli çalışma için geniş aralıklarda mevcuttur, ancak ilgili uygulamaya uygun dişli redüksiyonları gerektirir. Adım motoru, belirli uygulamalar için düşük hız sağladığı için herhangi bir dişli redüksiyonu gerektirmez. Son olarak servo motorlar, kapalı döngü işlemlerinde uygulanan hassas ve doğru kontrol için kullanılır. Ancak ekstra geri bildirim ve sürüş devresi gerektirdiğinden DC ve step motordan daha pahalıdır. Böylece servo motorlar, hassas hareketi nedeniyle robotu daha güvenilir hale getirir.
Viswanath Prathap
Elektrik Enerjisi Mühendisliğinde M.Tech
Teknik İçerik Yazarı

Seç ve yerleştir Robotlar genellikle endüstrilerde bir konumdan veya yerden bir nesne seçmek ve başka bir konuma veya yere yerleştirmek için bulunur. Bunun için robotların eklemlerinin açısal hareketlerinin servo motorlar kullanılarak kontrol edilmesi gerekmektedir. Bu servo motorlar, robotların eklemlerini harekete geçirmek için robotik kontrolör tarafından verilen PWM verileri kullanılarak kontrol edilir. Servo motorlar, bir nesneyi durma konumundan hızlı bir şekilde hareket ettirmek için yeterli bir tork üretebilir. Bu nedenle askeri ve endüstriyel robotik araçlarda tekerlek olarak kullanılırlar. Kademeli motorlar pozisyonu kontrol etmek için de kullanılabilir, ancak bunlar sadece komut verilen pozisyonu kilitlemek ve tutmak için dinlenme döneminde bile güç tüketecektir. Bu nedenle, servo motorlar tipik olarak endüstriyel robotikte kademeli motorların yerine yüksek performanslı bir alternatif olarak kullanılır.
S. Naresh Reddy
Gömülü Sistemde M.tech
Proje kılavuzu
Mekanik robotun yapısı perfo'ya göre kontrol edilmelidir.  rm görevi. Robotu kontrol etmek için algılama, işleme ve eylem olmak üzere üç farklı aşama vardır. Sensörler robota eklemlerinin konumu ve uç efektörü hakkında bilgi verir, daha sonra bu bilgi kontrol ünitesine işlenir ve mekanik olarak hareket eden motora uygun sinyali hesaplar. Robotların büyük çoğunluğu elektrik motorları kullanıyor. Portatif robotlarda tekrar tekrar fırçasız ve fırçalanmış DC motorlar, endüstriyel robotlarda AC motorlar kullanılmaktadır. Bu motorlar, daha hafif yüklerin olduğu ve hakim hareket biçiminin dönel olduğu sistemlerde tercih edilir.
rm görevi. Robotu kontrol etmek için algılama, işleme ve eylem olmak üzere üç farklı aşama vardır. Sensörler robota eklemlerinin konumu ve uç efektörü hakkında bilgi verir, daha sonra bu bilgi kontrol ünitesine işlenir ve mekanik olarak hareket eden motora uygun sinyali hesaplar. Robotların büyük çoğunluğu elektrik motorları kullanıyor. Portatif robotlarda tekrar tekrar fırçasız ve fırçalanmış DC motorlar, endüstriyel robotlarda AC motorlar kullanılmaktadır. Bu motorlar, daha hafif yüklerin olduğu ve hakim hareket biçiminin dönel olduğu sistemlerde tercih edilir.
Suresh megaji
Kablosuz İletişim Sistemlerinde M.Tech
Teknik İçerik Yazarı

'Robotik' e ve bunların 'endüstriye' uygulanmasına dahil olmak istiyorsanız, robotikte kullanılan 'Motorlar' hakkında bilgi sahibi olunmalıdır çünkü robotik çoğunlukla motorlara bağlıdır.Temel olarak 'robotik makineler' üretimde farklı uygulamalar için kullanılır. D.C, Pulsed, Stepper, Optical drive, Partial turn ve hall effect motorları vb. Gibi farklı 'motorlar', bunları endüstride uygulamak ve bunları kullanıcı dostu hale getirmek için bazı tekniklerle birlikte kullanılır.
- D.C motorlar, batarya odaklı uygulamalar, daha yavaş hız, mobilite uygulamaları için kullanılır.
- Rotasyon odaklı bir uygulamaya ihtiyaç duyduğumuz her yerde, tek kutuplu ve çift kutuplu motorlar gibi Step motorları kullanabiliriz.
- Baş ve kol hareketleri için kısmi dönüşlü motorlar kullanabiliriz.
- Manyetik alanlar kullanmak istiyorsak Hall Effect ve optik sürücü motorları vb. Kullanabiliriz.
Akıllı motorlar kullanan robotikler kullanarak paradan, zamandan, yerden, tehlikeli hareketlerden vb. Tasarruf edebiliriz.
Ajay Sahare
Pazarlama Yöneticisi

Endüstriyel robotlar, endüstriyel üretim ortamında kullanılır. Bunlar kaynak, malzeme taşıma, boyama ve diğerleri gibi uygulamalar için özel olarak geliştirilmiş kollardır.
Endüstriyel ortamda kullanılan her mekatronik cihaz bir robot olarak kabul edilemez. ISO (Uluslararası Standartlar Organizasyonu) tarafından tanımlandığı gibi, üç veya daha fazla eksende programlanabilen otomatik olarak kontrol edilen, yeniden programlanabilen, çok amaçlı bir manipülatör, endüstriyel robot olarak kabul edilir.
Endüstriyel Robotikte kullanılan motorlar
- Alternatif Akım (AC) Motorlar
- Doğru Akım (DC) Motorlar
- Servo motorlar
- Step Motorlar.
1. AC motorlar ayrıca asenkron ve senkron tiplere ayrılabilir. Örneğin, bir endüksiyon AC motoru, esas olarak bir tel sargılı stator ve bir rotordan oluşan asenkron tipte bir birimdir. Güç tele bağlanır ve içinden akan AC akımı, rotor hareketi için kuvvet sağlayan yeterince güçlü bir alan ile sarmal telde bir elektromanyetik (EM) alan oluşturur. Senkron motorlar, AC hat frekansı ile senkronize olarak çalışan ve genellikle hassas sabit hızın gerekli olduğu yerlerde kullanılan sabit hızlı motorlardır.
2. Robotik dahil birçok endüstriyel uygulama, hız ve yön kontrolünün kolaylığından dolayı genellikle DC motorları kullanır. Geniş bir yük yelpazesi ile tam hızdan sıfıra kadar sonsuz bir hız aralığı sağlayabilirler.
DC motorlar yüksek bir tork-atalet oranına sahip oldukları için, kontrol sinyallerindeki değişikliklere hızlı bir şekilde yanıt verebilirler. Bir DC motor, sorunsuz bir şekilde sıfır harekete kontrol edilebilir ve karmaşık güç anahtarlama devresine gerek kalmadan ters yönde anında hızlandırılabilir. Kalıcı mıknatıslı fırçasız DC motorlar genellikle fırça tiplerinden daha pahalıdır, ancak güç tüketimi ve güvenilirlik açısından avantajlar sağlayabilirler.
Bir komütatör olmadan, fırçasız motorlar, geleneksel DC motorlardan daha verimli ve daha yüksek hızlarda çalışabilir. Fırçasız DC motorların çoğu trapezoidal AC dalga formunda çalışır, ancak bazı motorlar sinüs dalgaları ile çalışır. Sinüs dalgasıyla çalışan fırçasız motorlar, düşük tork dalgalanması ile daha düşük hızlarda düzgün çalışma elde edebilir ve bu da onları taşlama, kaplama ve yüzey bitirme gibi diğer uygulamalar için ideal hale getirir.
Fırçalı DC motorlarda, motorunuzun güç kaybetmeden daha yavaş dönmesini istiyorsanız, darbe genişlik modülasyonunu (PWM) kullanabilirsiniz. Bu, temelde motoru çok hızlı açıp kapatmak anlamına gelir. Bu şekilde, motor, güce dikkat edilmeden daha düşük voltaj uygulanacakmış gibi daha düşük bir hızla döner.
Temel olarak, fırçalanmış bir DC motor tarafından üretilen tork çok küçük ve hız kullanışlı olamayacak kadar büyük. Bu nedenle, dişli redüksiyonları genellikle hızı azaltmak ve torku artırmak için kullanılır.
3. Servo motorlar, dijital kontrolörlü kapalı devre sistemlerde kullanılır. Kontrolör, bir sürücü amplifikatörüne hız komutları gönderir ve bu da servo motoru besler. Çözücü veya kodlayıcı gibi bir tür geri besleme cihazı, servo motorun konumu ve hızı hakkında bilgi sağlar. Çözümleyici veya kodlayıcı motora entegre edilebilir veya uzaktan yerleştirilebilir. Kapalı döngü sistemi nedeniyle, bir servo motor, kontrol cihazına programlanmış belirli bir hareket profili ile çalışabilir.
4. Step motorlar, motorun dönüşü küçük açısal adımlara bölünerek geri beslemeli veya geribildirimsiz çalışabilir. Darbeli komut sinyalleri ile kontrol edilir ve frenlere veya debriyaj tertibatlarına ihtiyaç duymadan komut verilen bir noktada hassas bir şekilde durabilir. Güç kesildiğinde, kalıcı mıknatıslı bir step motor genellikle son konumunda kalır. Birden çok kademeli motor, ortak bir kaynaktan sürülerek senkronizasyonda korunabilir.
Dev desai
Pazarlama Yöneticisi 
Robotikte yer almayı planlıyorsanız, mevcut birçok motor tipine aşina olmanız gerekecektir. Tüm robotik hareketler bir şekilde motorludur, bu nedenle seçeneğinizin ne olduğunu bilmek önemlidir.
DC Motorlar
Pille çalıştırılmasının yanı sıra, bir DC motorun hareket yönü, güç girişinin polaritesi tarafından belirlenir. Bu robotik fonksiyonlar için mutlak bir zorunluluktur. Neyse ki, bu tür bir motor çok çeşitli boyutlarda, voltaj gereksinimlerinde gelir ve her yerde mevcuttur.
Farklı motor türleri aşağıdaki gibidir
- Hareketlilik temel motoru
- Yüksek hızlı hobi motoru
- Kayış tahrik motoru
- Slot araba motoru
- Darbe işletilen
- Kola uyarlanmış motor
- İşaretçili bipolar step
Bio Motor
Bio-metal, birkaç yıldır piyasada bulunan harika bir maddedir ve robotik alanında çok sayıda uygulamaya sahiptir. Resimde görebiliyoruz ki, bir parça biyo-metal tel, üzerine sadece birkaç volt uygulandığında uzunluğunun yüzde beşi kadar küçülecektir. Yıllarca süren testlerden sonra, biyo-telin güçlü, güvenilir olduğu kanıtlandı ve yeni ürünler ortaya çıktıkça daha kullanışlı hale geliyor. Biraz daha yavaş tepki süresi, sarsıntının sorunlu olduğu robotik kol ve el uygulamaları için idealdir. Uzun bir tel parçası, robotik kolun tüm uzunluğu boyunca gerildiğinde önemli bir hareket oluşturabilir. Şu anda ticari pazarda bio metal kullanan robotik kol kitleri var.
Röleler
Robotikte röle, neredeyse her zaman motorlar için gereken gücü bilgisayar işlevi için güç kaynağından izole etmek için kullanılır. Motorlar, düşük empedansları nedeniyle, güç kaynaklarından yüksek akım talep eder ve bilgisayarların tahammül edemeyeceği birden çok aksaklık yaratır. Bu nedenle, sadece motorlar için ayrı bir yüksek akım kaynağı kullanmak iyi bir fikirdir.
Solenoidler
Solenoidler en iyi manipülatör kontrol cihazları veya anahtar operatörleri olarak kullanılır. Hareketleri hızlı ve güçlüdür, bu nedenle hareketi yumuşatmak için kavrayıcılarda neredeyse her zaman bir yay kullanılır. Resimde görebileceğiniz gibi, kavrayıcıyı kapatmak için kontrol telleri kullanılır. Bu kontrol telleri aynı zamanda dönüş yayları olarak da görev yapabilir. Bunun gibi tutucular, görevin çok ölçüldüğü ve dar parametreleri kapsayan üretim hattı işlerinde daha fazla bulunur.
İkincil Fonksiyonlar
Çoğu motor fonksiyon, hareketlilik, kol, baş veya diğer bazı görünür dış hareketleri içerir, ancak bazı motor hareketler o kadar görünür değildir. Büyük endüstriyel robotlar, bir hidrolik sıvının çalışma basıncını üretmek için pompa motorlarını kullanan hidrolik sistemleri kullanır. Motorların bir diğer önemli ikincil işlevi kontrollü ayarlamadır. Doğruluğu artırmak için, motorlarla arayüzlenen potansiyometreler genellikle çok turlu cihazlardır.
Sonuç
Robotlar, çok çeşitli motorlu hareketler gerektiren çok karmaşık cihazlar olabilir. Bu makale, bir robot üreticisi olarak uğraşabileceğiniz çeşitli cihazlara genel bir bakış sunmayı amaçlamaktadır. Robotik ekipman tedarikçileri ve mevcut malzemeler hakkında araştırma yaparak başlamak iyi bir fikir olacaktır. Şu anda mevcut çok sayıda ürün var ve İnternet bulmayı, öğrenmeyi ve kullanmayı kolaylaştırıyor. İhtiyaçlarınız ne olursa olsun, biraz ustalık ve tüm robot üreticilerinin sahip olduğu kararlılık size iyi hizmet etmelidir.
Samadan Wandre
Pazarlama Yöneticisi
'Robotikte kullanılan motorlar'
- Hareketlilik temel motoru

- Yüksek hızlı hobi motoru
- Kayış tahrik motoru
- Slot araba motoru
- Darbe işletilen
- Kola uyarlanmış motor
- İşaretçili bipolar step

Daha büyük motorlar, robotların arazide manevra yapmasına izin veren mobilite üsleri için en uygun olanıdır. Bu motorlardan bazıları, hareketlilik için gereken daha düşük hız ve torku üretmek için dişli kutuları ile birlikte gelir. Bir motora voltajı düşürmek, onu daha istenen bir hıza da yavaşlatabilir. Motorunuzun daha düşük bir voltajla çalışıp çalışmayacağını yalnızca deneyler belirleyebilir. Eğer öyleyse, kendinizi çok fazla sorundan kurtardınız, yoksa motorları yavaşlatmanın başka yolları da var. Sonsuz dişliler veya vidalı dişliler kullanılıyorsa bazı yüksek hızlı motorlar kullanılabilir.
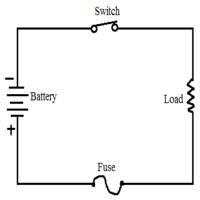
Robotik kol çiziminde vida dişlisinin bir örneği görülebilir. Motor saat yönünde döndüğünde cıvata grubu motora çekilir ve kol büzülür ve saat yönünün tersine döndüğünde kol uzar. Motor şaftı hızlı dönmesine rağmen, vidanın azalması nedeniyle kol hareketi önemli ölçüde daha yavaştır.Bu aşağıdaki motor devresi çiziminde, bir güç transistörü tarafından kontrol edilen bir DC motor görüyoruz. Bir röle anahtarı (Çift Kutuplu Çift Atış) yönü belirler. Transistör Q1, bir motorun ağır yükünü alacak bir güç transistörü olmalıdır.
Darbeli Motorlar
Bazı motorlar, darbeli bir DC sinyalinden çalışarak bir hız düşüşü elde eder. Bu sinyal genellikle yaklaşık yüz Hz'dir. Motorun hızı, darbenin frekansını değiştirerek değil, darbe genişliği değiştirilerek değiştirilebilir. Bunun gibi motorlar, fazla elektronik mağazalarında bulunabilir ve kendisine bağlanan puls üreteci ile kolayca tanımlanabilir. Herhangi bir DC motor, bir darbe kaynağı ile çalıştırılabilir ve böyle bir devrenin şeması dahildir.
Gördüğünüz gibi sürücü osilatörü olarak yaklaşık 100 Hz frekans üreten bir 555 zamanlayıcı seçilmiştir. Direnç R1 ve kapasitör C, sinyal jeneratörünü motor tarafından üretilen sivri uçlardan stabilize eder ve izole eder. Bu cihaz 6 ila 12 voltluk bir güç kaynağından çekebildiğinden, kullandığınız gerilime bağlı olarak daha iyi sonuçlar için C4 ve C6 kapasitörlerinin değerini değiştirmek isteyebilirsiniz. Darbe çıkışı IC1'in üçüncü pininden alınır ve yine 555 zamanlayıcı olan IC2'nin ikinci pinine beslenir.
İkinci zamanlayıcı, potansiyometre R5 ve direnç R6 aracılığıyla kapasitör C6'ya beslenen voltajı ayarlayarak darbenin genişliğini değiştirir. Darbenin süresi, motorun hızını belirleyen şeydir ve darbe genişliği% 10 ile% 100 arasında ayarlanabilir.
Transistör Q1, darbe genişlik modülasyonlu sinyali R7 direnci üzerinden alır. Q1 düşük akımlı bir cihaz olduğundan, sinyali motorun mevcut taleplerini karşılayabilen bir güç transistörü olan Q2'ye iletir. Bu transistörler kritik değildir ve neredeyse her tür düşük akım güç transistörü çalışacaktır. Röle, motorun hangi yöne gideceğini belirleyecektir.
Step Motorlar
Tüm motorların en karmaşık olanı step motordur. Adından da anlaşılacağı gibi, motor derece artışlarla döner ve darbeli çalıştırılır. Adım başına kesin dönüş derecesi, bir üreticiden veya modelden diğerine değişebilir, ancak 20 derece popülerdir ve bir tam dönüş için 18 adım üretir. İki temel tip step motor vardır: bipolar ve unipolar. Kademeli motor şemasında görebileceğiniz gibi, bipolar basitçe iki bobinle çalışan bir motordur.
Tek kutuplu tip, merkez musluklu iki bobindir. Merkez vuruşlar ihmal edilirse, tek kutuplu motor bipolar tip olarak çalışabilir. Bir kademeli motordaki iki bobin, bobinden bobine dönüşümlü olarak polaritede kademeli darbeler beslenir. Motor hareketini grafiksel olarak temsil etmek için çalışma diyagramında bu sürecin bir haritası verilmiştir. Geleneksel DC motorların aksine, tork hızla azalır. Step motoru ilerletmek için özel bir tahrik ünitesi türü de gereklidir ve motorla birlikte tedarik edilmelidir. Motor, bileşen önerileri ve tam şematik olan iyi bir özellik sayfasıyla birlikte sağlanmadıkça bir kontrol ünitesi kurmanız önerilmez.
Motor, onu sürücü sisteminden izole etmek için tamponlar gerektirebilir veya ayrı bir güç kaynağı gerektirebilir. İhtiyaçlar ne olursa olsun, bir motordan diğerine önemli ölçüde değişebilir. Hobi dükkanları, step motorların en güvenilir tedarikçileridir ve ihtiyaç fazlası elektronik mağazalarında ara sıra bulunsa da, gerekli teknik özellik bilgilerini içermeyebilirler.
Kısmi Dönüş Motorları
Bazı robotik işlevler, baş veya kol hareketleri gibi yalnızca kısmi bir dönüş gerektirir. Bunları elde etmenin en kolay yolu pozisyon durdurucular ve kayar dişlilerdir. Bu tip motorun mekanik detaylarının bir açıklaması yukarıda verilmiştir. Mikro anahtarlar, gücü kapatmak ve bir sonraki eylemin yönünü sıfırlamak için durdurma sensörleri olarak kullanılabilir.
Alt çark motora bağlanırken, üst çark alt çarktan dairesel bir keçe parçasıyla ayrılır. Alt tekerlek döndüğünde, üst tekerlek, durdurma pimi mikro anahtarla temas edene kadar onunla döner. Bazı tasarımlar motoru durdurmak için hükümler sağlamaz, bu nedenle ara parçalara sahip basit vidalar motor durdurucu olarak işlev görür.
Bio-Motor
Bio-metal, birkaç yıldır piyasada bulunan harika bir maddedir ve robotik alanında çok sayıda uygulamaya sahiptir. Resimde görebiliyoruz ki, bir parça biyo-metal tel, üzerine sadece birkaç volt uygulandığında uzunluğunun yüzde beşi kadar küçülecektir. Yıllarca süren testlerden sonra, biyo-telin güçlü, güvenilir olduğu kanıtlandı ve yeni ürünler ortaya çıktıkça daha kullanışlı hale geliyor. Biraz daha yavaş tepki süresi, sarsıntının sorunlu olduğu robotik kol ve el uygulamaları için idealdir. Uzun bir tel parçası, robotik kolun tüm uzunluğu boyunca gerildiğinde önemli bir hareket oluşturabilir. Şu anda ticari pazarda bio metal kullanan robotik kol kitleri var.
Bhaskar Singh
Pazarlama Yöneticisi
 Endüstriyel robotlar, tehlike azaltmanın yanı sıra insan hareketini bir dereceye kadar kopyalayan, daha fazla güç, doğruluk ve süreklilik sağlayan cihazlardır. Operasyonel modlarına, kontrollerine, kullandıkları araçlara ve yapılacak işe bağlı olarak çok çeşitli motor tahrikli hareketlere ihtiyaç duyarlar. Endüstriyel bir robotik motor, belirli bir görevde uzmanlaşmak için normal motorlara göre çok çeşitli görevleri yerine getirme potansiyeline sahip olmalıdır.
Endüstriyel robotlar, tehlike azaltmanın yanı sıra insan hareketini bir dereceye kadar kopyalayan, daha fazla güç, doğruluk ve süreklilik sağlayan cihazlardır. Operasyonel modlarına, kontrollerine, kullandıkları araçlara ve yapılacak işe bağlı olarak çok çeşitli motor tahrikli hareketlere ihtiyaç duyarlar. Endüstriyel bir robotik motor, belirli bir görevde uzmanlaşmak için normal motorlara göre çok çeşitli görevleri yerine getirme potansiyeline sahip olmalıdır.
Elektrik motorları, yüksek verimli güç kaynağı ve nispeten basit tasarım nedeniyle endüstriyel robotikte en yaygın olarak kullanılır, bu da onları her açıdan - kurulum, bakım ve servis - maliyet-performans oranı açısından daha popüler bir seçenek haline getirir.
İhtiyaç duyulan işe bağlı olarak, farklı amaçlar için farklı motorlar kullanılır. Örneğin, saat yönünde ve saat yönünün tersine hareketler için DC motorlar kullanılır, örnekler vinçlerde ve vinçlerde, darbeli motorlar DC darbe genişliğini kullanarak darbeli hareketler sağlamak için kullanılır, kısmi dönüş motorları kafa ve kol benzeri hareketler sağlamak için kullanılır ve en karmaşık olanı - Kademeli motorlar, derece artışlarla kademeli dönüşler sağlamak için kullanılır.
Ayrıca işin türüne bağlı olarak, farklı amaçlar için farklı güç ve büyüklükteki motorlar kullanılmaktadır.İş ve robot tasarımına bağlı olarak her biri farklı yerlerde farklı uygulamalara sahip birkaç motor tipi bulunmaktadır.
Mohan Krishna. L
Satış ve Destek Sorumlusu
Robotlar, insanlar tarafından yapılabilecek işi yapmak için kullanılır ve Robotların İnsanlardan daha iyi olmasının birçok nedeni vardır. 
İki ana Robot türü vardır: -
Mobil Robot: Bacaklar veya raylar üzerinde hareket eden.
Sabit Robot: Sabit bir tabanı var.
Sabit robotlar genellikle Robot Kolları, nesneleri toplamak veya bir nesneye ulaşmayı içeren başka bir işi yapmak için kullanılabilir.
Bir Robot Kolunun üç temel parçası vardır: -
- Omuz eklemi
- Bilek eklemi
- Sabit taban
İçin bir robota ihtiyacım var
- Hızlı ve Tehlikeli ortamda çalışabilme becerisi.
- Görevleri tekrar tekrar tekrar etme yeteneği.
- Doğru çalışabilme yeteneği.
- Farklı görevler yapabilme yeteneği.
- Verimlilik.
Motor, elektrik enerjisini mekanik enerjiye yani elektromekanik cihaza çeviren bir cihazdır AC Motor ve DC Motor olmak üzere iki tip motor vardır.
Endüstriyel Robotikte kullanılan Motor Servo Motordur. Servo motor, servo mekanizma yardımı ile kontrol edilen basit bir elektrik motorudur.Kontrol edilen motor AC ile çalıştırılıyorsa, AC Servo motor, aksi takdirde DC Servo motor olarak adlandırılır.Çoğu servo motor yaklaşık 90-180 derece dönebilir, hatta bazıları dönebilir. tam 360 derece veya daha fazla. Robotikte servo motorun Uygulamalarından Bazıları
- Robotikte servo motor uygulaması, yani Basit bir alma ve yerleştirme robotu, bir nesneyi bir konumdan seçmek ve nesneyi farklı bir konuma yerleştirmek için kullanılır.
- Konveyörlerde servo motor kullanılmıştır
- Bir nesneyi bir montaj istasyonundan diğerine geçirmek için endüstriyel Üretim ve montaj ünitelerinde. Örn: - Bir Şişe Doldurma işlemi.
- Robotik araçta servo motor burada Tekerleklerde kullanılan Servo motordur. Sürekli dönüşlü servo motor kullanıldığından.
Dinesh.P
Pazarlama Yöneticisi
 İnsanların zor işlerini azaltmak ve gelecekteki gelişmeler için insanlara iyi bir servet yaratmaya yardımcı olmak için robotlar tanıtılacak. Robot terimi, çeşitli insan özelliklerini taklit eden makine anlamına gelir. Robotik; mekanik, elektronik, elektrik ve Bilgisayar bilimleri mühendisliği bilgilerini içerir. Robotlarda kullanılan motorlar DC Motorlar, Step Motorlar ve Servo Motorlardır.
İnsanların zor işlerini azaltmak ve gelecekteki gelişmeler için insanlara iyi bir servet yaratmaya yardımcı olmak için robotlar tanıtılacak. Robot terimi, çeşitli insan özelliklerini taklit eden makine anlamına gelir. Robotik; mekanik, elektronik, elektrik ve Bilgisayar bilimleri mühendisliği bilgilerini içerir. Robotlarda kullanılan motorlar DC Motorlar, Step Motorlar ve Servo Motorlardır.
Nerede,
- Sürekli Dönüş için DC Motorlar kullanılır
- Kademeli Motorlar birkaç derecede dönüş için kullanılır
- Servo Motorlar konumlandırma için kullanılır, otomobillerde ve uçaklarda kullanılabilir.
Ganesh .J
Pazarlama Yöneticisi 
Robotlar, insanlar tarafından yapılabilecek işleri yapmak için kullanılır ve aynı zamanda insan emeğini ve zamanını azaltır ve kaliteyi arttırır.Endüstriyel robotikte kullanılan motorlar
- Alternatif Akım (AC) Motorlar
- Doğru Akım (DC) Motorlar
- Servo motorlar
- Step Motorlar.